TDK-Lambda Sponsorships
- HOME
- News
- TDK-Lambda Sponsorships
University Sponsorship Program
TDK-Lambda Americas is proud to sponsor bright Engineering students and their creative projects by providing power supplies for their endeavors. Contact our Marketing department if you would like us to sponsor your Engineering project.

TDK-Lambda recently helped sponsor Georgia Tech University projects with donation of our Z+ programmable power supplies used in testing the electronics!


TDK-Lambda partnered with Michigan State University Solar Racing Team as they prepare for the American Solar Challenge. MSU Solar Racing aims to efficiently design and manufacture solar-powered vehicles and promote sustainability and STEM education. They have built five vehicles since 2000, driving the automotive industry towards a cleaner, greener future. This year, students are constructing their first Multi-Occupant Vehicle, for which TDK-Lambda has provided various power supplies.



TDK-Lambda recently helped sponsor University of Wisconsin - Madison with their Formula Electric Race Car project by supplying them with a Z+ programmable Power Supply used testing the electronics!


TDK-Lambda recently helped sponsor Northern Illinois University with their NIU Mars Rover project by supplying them with 4 pieces of the i6A4W020A033V-001-R!




TDK-Lambda donated DC-DC power converters to the Solar Gators team at the University of Florida to power all of the low voltage electronics on their car which got in 24 miles of solar powered racing, 11 times better than last year (their first year of racing).
Most new teams take a few years to just qualify to race on the track, but with the help of TDK-Lambda, the Solar Gators were able to achieve this in only two years!


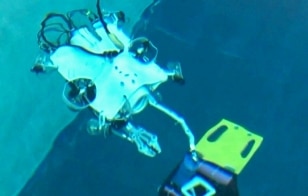
The AMNO & CO ROV Team competed in 2016's MATE international Remotely Operated Vehicle (ROV) competition, and received the Safety Conscious award, the Sharkpedo Innovation award, Best Engineering Presentation and 3rd place overall at the Explorer class. The AMNO & CO ROV Team competed against 32 teams, mainly from colleges and universities all over the world, in NASA's 40-foot deep Neutral Buoyancy Lab – the deepest their ROV has ever been. This was made possible with the help of TDK-Lambda throughout the year's design process.
The power converters provided by TDK-Lambda were an essential part of the ROV's control system. 2016 was the first year AMNO & CO ROV Team competed in the Explorer class, and it required the ROV be powered off of 48 volts and 50 amps rather than the 12 volts and 25 amps they were accustomed to. For some systems, they were glad to have the extra power, but for other systems – such as thrusters, sensors and delicate electronics – precautions had to be taken to make sure they were never exposed to higher voltages than they could safely handle. To integrate TDK-Lambda power converters into the control system, custom printed circuit boards were designed that would safely hold the converters and distribute the correct power to various subsystems. These converters were an essential part of the most complicated control system ever made by the AMNO & CO ROV Team.
The AMNO & CO ROV Team been participating in the MATE ROV competition for seven years, and as a result have had a number of wonderful opportunities. These include mentoring younger teams, internships, scholarships and the honor of being invited to President Obama's 6th annual White House Science Fair (as a result of placing 1st in the mostly high school category last year)! They were able to present their work to the people in attendance, including NASA astronauts, engineers and members of President Obama's administration (including the Secretary of Nanotechnology and the Director of Science and Technology Policy).



Project APPA
Team SkyBison is building a quadcopter drone with a powered tether capable of unlimited flight. DJI, a leader in easy-to-fly drones and aerial photography systems, is sponsoring the project and providing a Matrice 100 platform to be modified.
To power the drone, household 110VAC will first be stepped up to 240VAC using a 5000W voltage transformer. The transformer will connect to the powered tether cable via a NEMA 6-20 three blade plug. There will be a Mercotac brushless rotary electrical between the plug and the spooled tether to allow rotation between spool and plug without wear of the cabling. The tether will use three 22AWG wire that will be secured with small segments of heat shrink every 6 inches. At the drone, the tether will connect to the TDK-Lambda PFE-1000 AC-DC converter power supply with ring terminals and the tether will be strain relieved to prevent strain on the connection terminals. The power supply will mount with zip ties to the bottom of the drone for convective cooling from an auxiliary fan. The AC-DC converter will connect to the stock drone power input with a short cable and quick disconnect terminals.




The design team at Northeastern University in Boston, Massachusetts has been working to design and fabricate a mechanical testing platform that realistically simulates the riding forces of a bicycle in a bike lane. By mimicking real bicycle-related forces, the system will help the Intelligent Human-Machine Systems Laboratory investigate bicyclist safety and the effectiveness of different bike lane designs. The team's device has been designed in a way that has never been attempted. The device moves the ground supports laterally beneath the rider, identically to real bicycle wheels. To achieve this, motor-driven wheels are mounted perpendicular to the bike's frame. These motors accelerate the entire bike horizontally, allowing for small lane shifts and slaloms. As the rider turns the handlebars, these motors will drive the front wheels to roll in the direction of the turn. This effect will allow the rider to balance through steering. The rear wheels will be controlled by the angle of the bike frame and will lag behind the front wheels.


The 2014 Purdue Electric Racing Team placed 4th in Design and 14th overall in this year's Formula SAE Electric Lincoln competition.


University of Waterloo took a traditional rod hockey game, ripped out the existing mechanicals, added stepper motors, and made the whole thing playable with USB gamepads. It turned out very well! The Computer Engineering group had hundreds of people through their booth during the day to see the poster and demo.
This is Jonathan in the Ottawa Senators jersey and Tim is in the green Dallas Stars colors. The bottom photo shows the 24V power supply in action during the design phase. Finally, they also have a YouTube channel where several videos allow you to track their progress all the way up to final completion.



"The MSOE Underwater Robotics Team is back from the Marine Advanced Technology Education (MATE) International Remotely Operated Vehicle (ROV) Competition in Seattle, WA, and we wanted to share our experience with you! There were four aspects that comprised our score: an engineering presentation, 20 page technical report, poster display, and pool mission. We did extremely well on our engineering presentation and technical report. Out of 23 teams, we placed 1st for our presentation and 2nd for our technical report (and it is attached for your viewing pleasure)! Although some mysterious electrical communication issues prevented us from achieving a high mission score, the team placed 13th overall! As a first year team, we are very happy with this outcome. Everyone on the team gained a lot of knowledge and made many friends from teams all over the world including Saudi Arabia, Scotland, and Russia. The team is excited to start making innovations to our ROV to improve our mission score! Only 11 months and 23 days until the next competition!"
Seth Opgenorth, MSOE Computer Engineer '16, MSOE Underwater Robotics President '13





